资料同化简单来说就是结合模式背景预报和观测信息得到大气状态的最优估计。业务同化通常是采用预报步和同化步的循环策略来实现,也就是预报步中模式短时积分获得背景场,同化步将背景场和观测进行同化得到分析状态(图1)。在预报步中,由于混沌大气模式的自由积分,造成信息丢失;而同化步引入观测拉进和真实大气的距离,增加了信息。长期周而复始,这就达到了循环同化中的信息的长期平衡。并且,分析状态的质量(或误差),虽然在循环间振荡,但也到了一个稳定水平。如果同化系统有明显缺陷,则未必达到这种平衡,最终导致滤波发散。因此,一个核心的问题是哪些关键要素决定了循环同化中的信息平衡和分析质量的稳定水平?显然,业务系统维数太高且复杂,无法对这一问题进行清晰的实际诊断和理论分析。
我系冯杰研究员(第一和通讯作者)联合美国国家大气海洋局的Zoltan Toth研究员和康涅狄格大学的Malaquias Pena教授,提出了描述循环同化过程中误差演变的理论模型,并借助该理论模型,结合实际业务系统的评估,从理论和实际的角度阐明了循环同化系统中的信息平衡动力及其关键影响因子,为业务同化系统的发展提供关键性理论支撑。
首先,通过理论推导,我们发现从信息的角度,分析状态中的信息本质上都来源于观测,包括现在和过去的所有观测,而过去的观测会随时间e指数衰减。模式在同化中的作用是对观测信息进行时空传播。
第二个核心发现是,如果是最优同化,即可以对背景和观测误差协方差进行完美估计,那么平衡后的分析误差只决定于两个因素,第一是模式的动力不稳定性(即误差增长率),第二是观测的质量(或误差方差)。有意思的是,在最优同化下,同化给与背景场的权重理论上等于模式误差增长率的倒数。而且,如果模式的不稳定性很弱(即误差增长率小),那么循环同化达到平衡的时间就会更长。
然而,实际中,由于背景和观测误差协方差都无法准确估计,实际同化是次优的。这时候,同化的平衡态还取决于第三个因素,也就是实际施加在背景场上的权重,这个一般是通过经验估计的。我们结合实际业务同化预报系统的误差估计发现,目前主流的循环同化系统的实际背景场权重都偏离最优值,且一致地低估了背景场的权重,高估了观测的权重(图2)。这导致的结果是目前所有业务同化系统的实际分析误差方差都高于最优值(图3)。这也就是说,在给定目前模式和观测系统的情况下,仍然可以通过优化同化系统,一定程度上改进分析质量。
最后,基于我们的理论误差平衡模型分析表明,ECMWF的分析误差尽管在几大中心是最小的,但其平衡分析误差的变化对背景场权重的调整是最不敏感的。这意味着,理论上ECMWF进一步改进同化系统性能的困难性要显著高于其它业务系统。
论文信息:
Feng, J.*, Z. Toth, and M. Pena, 2025: The Limits of Knowing: An Equilibrium Between the Observational Gain and Chaotic Loss of Information in Data Assimilation. Quart. J. Roy. Meteor. Soc.e70067,https://doi.org/10.1002/qj.70067
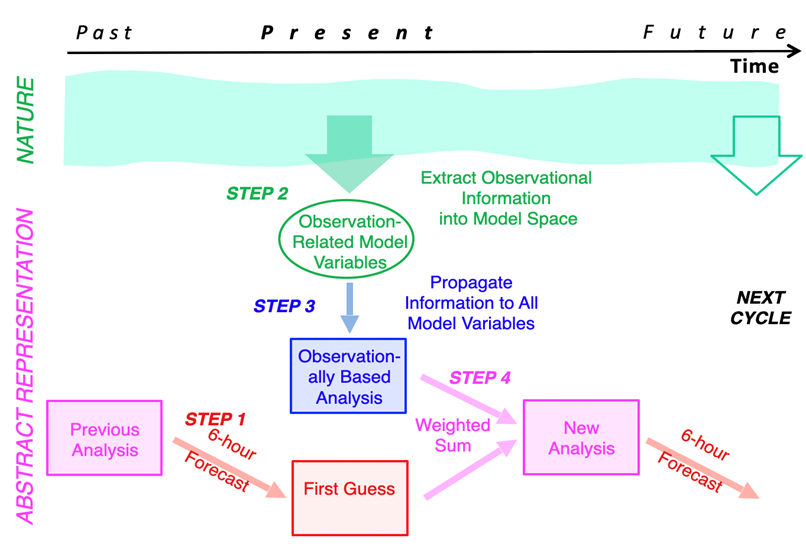
图1 同化循环的示意图。
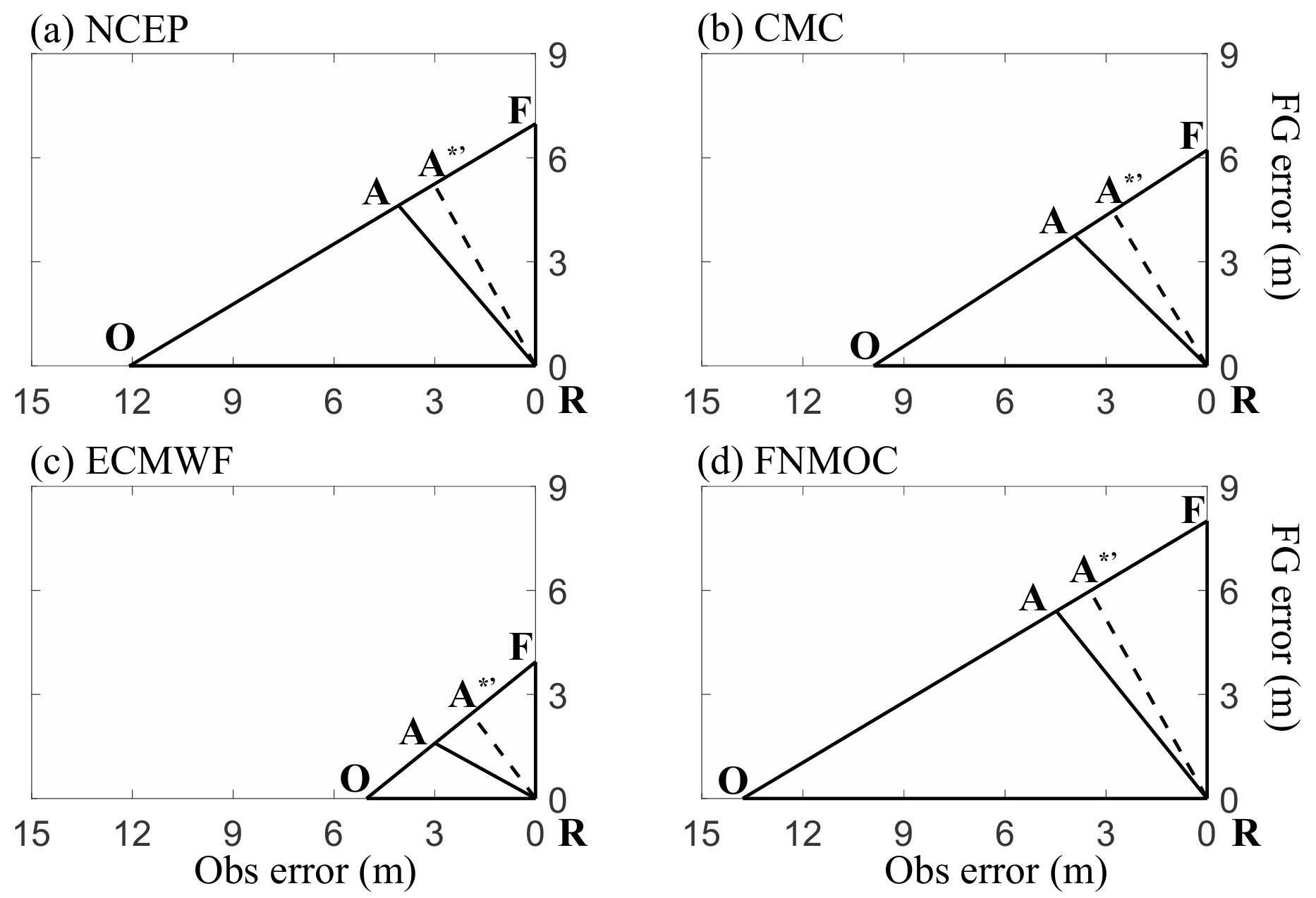
图2 (a)NCEP,(b)CMC,(c)ECMWF和(d)FNMOC的业务同化系统的最优和实际分析状态,观测状态和背景场状态的关系。
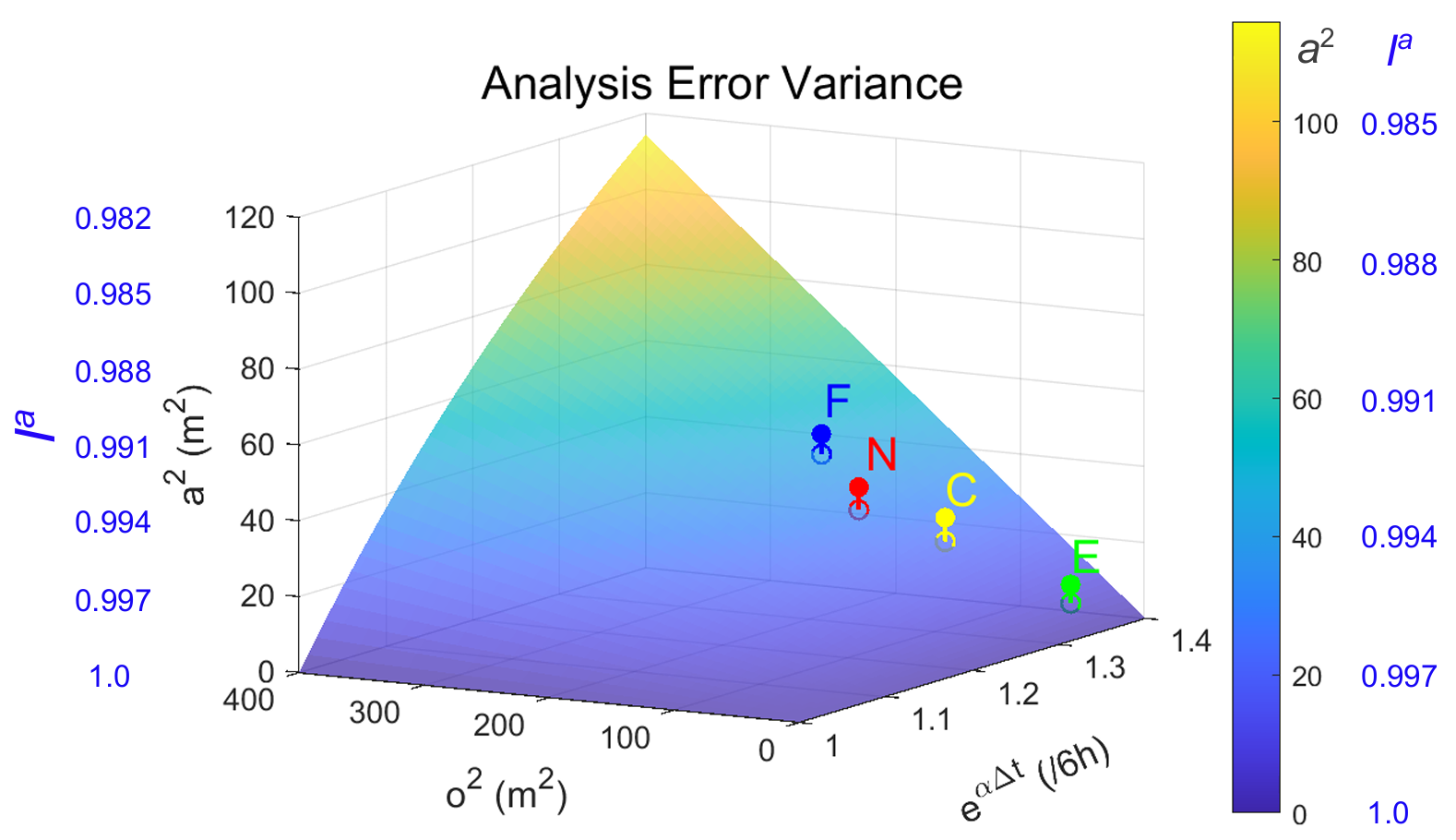
图3 分析误差方差随观测误差方差和模式动力增长率的关系。空心和实心状态分别代表FNMOC (F), NCEP (N), CMC (C), and ECMWF (E)的最优和实际分析误差方差。
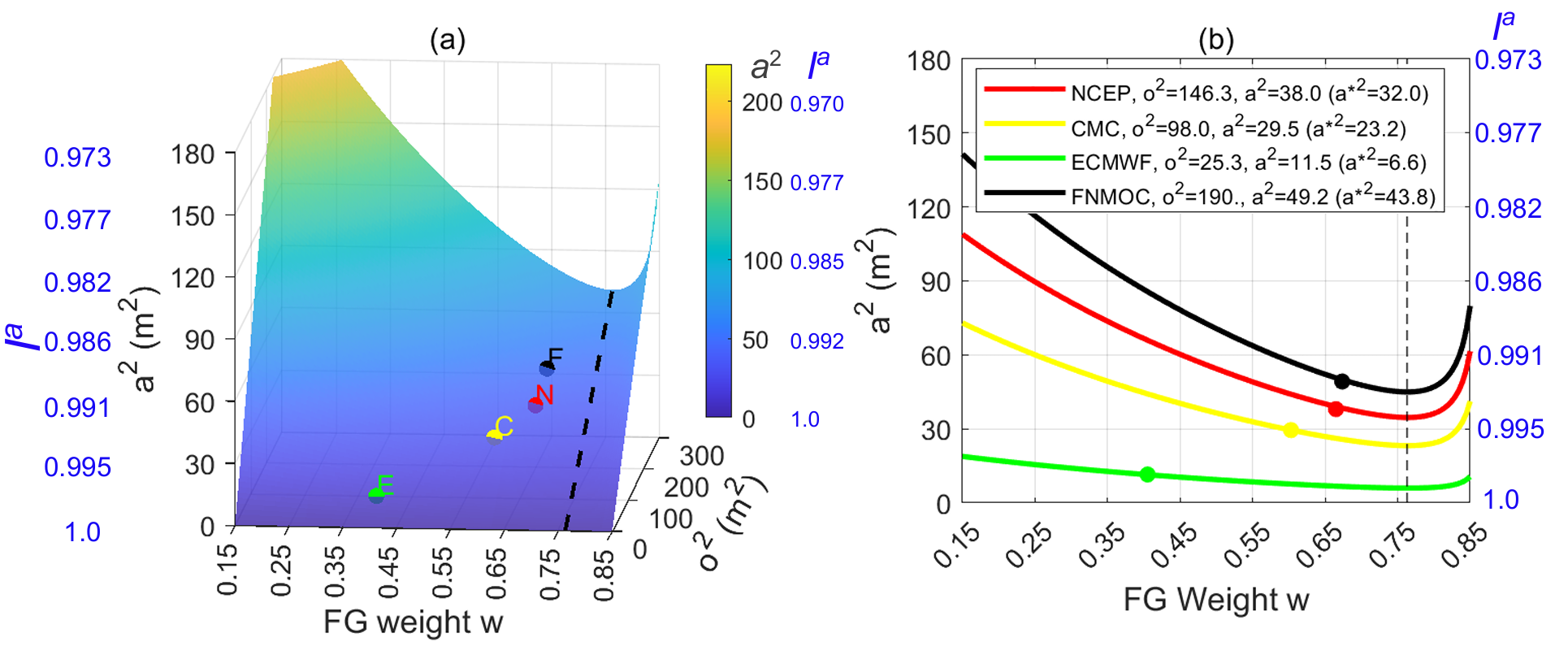
图4 (a)分析误差方差随背景场权重和观测误差方差的变化。(b)给定观测误差方差情况下,分析误差方差随背景误差权重的变化。
